
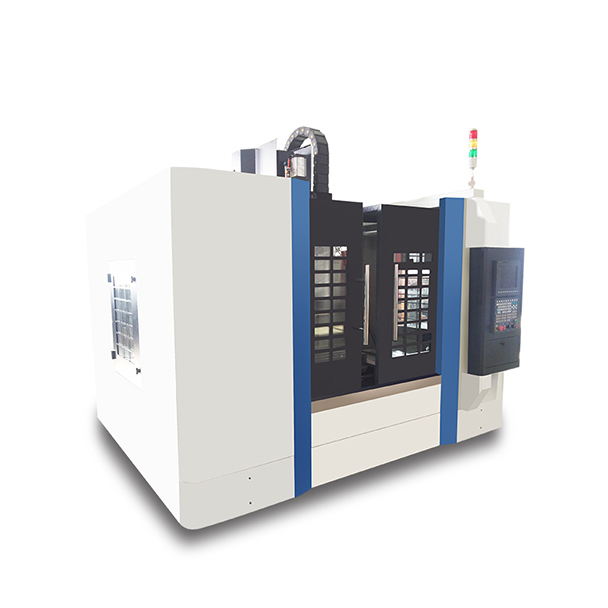


vmc1060 ਫੈਕਟਰੀ ਮੈਟਲ 3 ਐਕਸਿਸ ਵਰਟੀਕਲ ਸੀਐਨਸੀ ਮਿਲਿੰਗ ਮਸ਼ੀਨ ਸੈਂਟਰ
ਫਾਇਦਾ
1. ਵਿਕਲਪਿਕ CNC ਟਰਨਟੇਬਲ ਚਾਰ-ਧੁਰਾ ਅਤੇ ਪੰਜ-ਧੁਰਾ ਤਾਲਮੇਲ ਲਿੰਕੇਜ ਪ੍ਰੋਸੈਸਿੰਗ ਬਣਾ ਸਕਦਾ ਹੈ।
2. ਅੰਦਰੂਨੀ ਸਫਾਈ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਬੈੱਡ ਢਾਂਚੇ ਦੇ ਨਾਲ ਵਿਕਲਪਿਕ ਆਟੋਮੈਟਿਕ ਚਿੱਪ ਹਟਾਉਣ ਵਾਲਾ ਯੰਤਰ;ਵਿਕਲਪਿਕ ਸਪਿੰਡਲ ਆਇਲ ਕੂਲਿੰਗ, ਆਦਿ
3. ਕਾਸਟਿੰਗ ਸਮੱਗਰੀ ਵਿੱਚ ਰਹਿੰਦ-ਖੂੰਹਦ ਦੇ ਤਣਾਅ ਨੂੰ ਖਤਮ ਕਰਨ ਲਈ ਦੋ ਬੁਢਾਪੇ ਦੇ ਇਲਾਜਾਂ ਵਿੱਚੋਂ ਗੁਜ਼ਰਦੀ ਹੈ।
4. X, Y, Z-ਦਿਸ਼ਾ ਗਾਈਡਾਂ ਤਾਈਵਾਨ ਦੀ ਹੈਵੀ-ਡਿਊਟੀ ਰੇਖਿਕ ਬਾਲ ਗਾਈਡਾਂ ਦੀ ਚੋਣ ਕਰ ਸਕਦੀਆਂ ਹਨ, ਜਿਸ ਵਿੱਚ ਤੇਜ਼ ਗਤੀ, ਉੱਚ ਕਠੋਰਤਾ ਆਦਿ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਹੁੰਦੀਆਂ ਹਨ।

ਨਿਰਧਾਰਨ
| ਆਈਟਮ | VMC1060 | ||||
| ਵਰਕਟੇਬਲ ਦਾ ਆਕਾਰ (ਲੰਬਾਈ × ਚੌੜਾਈ) ਮਿਲੀਮੀਟਰ | 1300×600 | ||||
| ਟੀ ਸਲਾਟ (ਮਿਲੀਮੀਟਰ) | 5-18×100 | ||||
| ਵਰਕਟੇਬਲ 'ਤੇ ਵੱਧ ਤੋਂ ਵੱਧ ਲੋਡਿੰਗ ਭਾਰ (KG) | 650 | ||||
| ਐਕਸ-ਐਕਸਿਸ ਯਾਤਰਾ(ਮਿਲੀਮੀਟਰ) | 1000 | ||||
| Y-ਧੁਰੀ ਯਾਤਰਾ(mm) | 600 | ||||
| Z-ਐਕਸਿਸ ਯਾਤਰਾ(mm) | 600 | ||||
| ਸਪਿੰਡਲ ਨੱਕ ਅਤੇ ਟੇਬਲ (ਮਿਲੀਮੀਟਰ) ਵਿਚਕਾਰ ਦੂਰੀ | 100-700 ਹੈ | ||||
| ਸਪਿੰਡਲ ਸੈਂਟਰ ਅਤੇ ਕਾਲਮ (ਮਿਲੀਮੀਟਰ) ਵਿਚਕਾਰ ਦੂਰੀ | 667 | ||||
| ਸਪਿੰਡਲ ਟੇਪਰ | BT40/50 | ||||
| ਅਧਿਕਤਮਸਪਿੰਡਲ ਸਪੀਡ (rpm) | 8000/10000/12000 | ||||
| ਸਪਿੰਡਲ ਮੋਟਰ ਪਾਵਰ (Kw) | 11/15 | ||||
| ਤੇਜ਼ ਫੀਡਿੰਗ ਸਪੀਡ: X,Y,Z ਧੁਰਾ (m/min) | 16/16/16 (24/24//24 ਲਾਈਨਰ ਗਾਈਡਵੇ) | ||||
| ਤੇਜ਼ ਕੱਟਣ ਦੀ ਗਤੀ (m/min) | 10 | ||||
| ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ (ਮਿਲੀਮੀਟਰ) | ±0.005 | ||||
| ਦੁਹਰਾਓ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ (mm) | ±0.003 | ||||
| ਆਟੋ ਟੂਲ ਚੇਂਜਰ ਕਿਸਮ | 16 ਟੂਲ ਹੈੱਡ ਟਾਈਪ ਟੂਲ ਚੇਂਜਰ (ਵਿਕਲਪਿਕ 24 ਆਰਮ ਟਾਈਪ ਆਟੋ ਟੂਲ ਚੇਂਜਰ) | ||||
| ਅਧਿਕਤਮਟੂਲ ਦੀ ਲੰਬਾਈ (ਮਿਲੀਮੀਟਰ) | 300 | ||||
| ਅਧਿਕਤਮਟੂਲ ਵਿਆਸ | Φ80(ਨਾਲ ਲੱਗਦੇ ਟੂਲ)/φ150(ਨਾਲ ਲੱਗਦੇ ਟੂਲ ਨਹੀਂ) | ||||
| ਅਧਿਕਤਮ ਟੂਲ ਵਜ਼ਨ (KG) | 8 | ||||
| ਟੂਲ ਬਦਲਣ ਦਾ ਸਮਾਂ (ਟੂਲ-ਟੂ-ਟੂਲ) ਸਕਿੰਟ | 7 | ||||
| ਹਵਾ ਦਾ ਦਬਾਅ (Mpa) | 0.6 | ||||
| ਮਸ਼ੀਨ ਦਾ ਭਾਰ (ਕਿਲੋਗ੍ਰਾਮ) | 7500 | ||||
| ਕੁੱਲ ਆਕਾਰ (ਮਿਲੀਮੀਟਰ) | 3340*2800*2700 | ||||
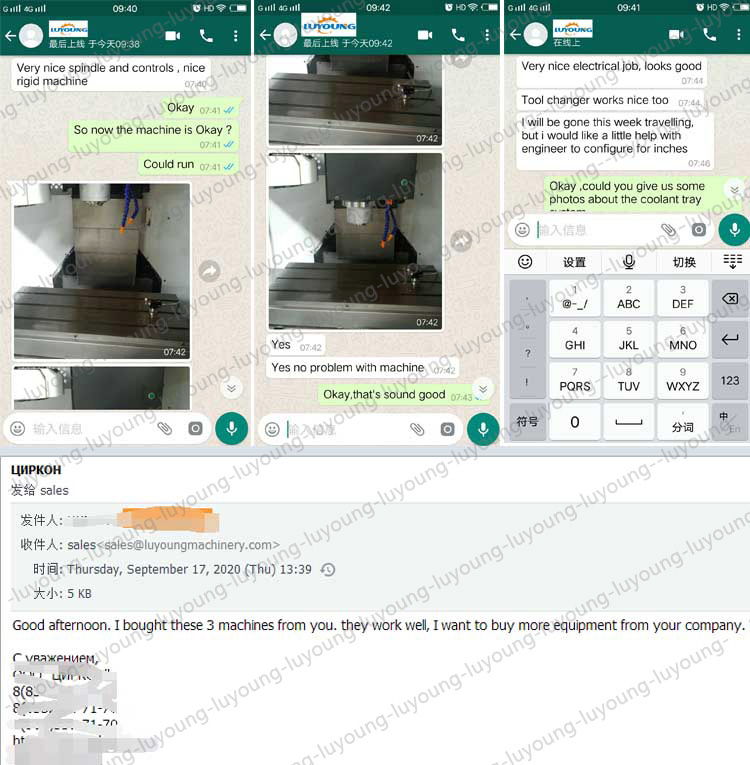
ਸਾਨੂੰ ਕਿਉਂ ਚੁਣੋ
ਸਾਨੂੰ ਗਾਹਕਾਂ ਤੋਂ ਬਹੁਤ ਵਧੀਆ ਫੀਡਬੈਕ ਮਿਲਦੀ ਹੈ, ਉਦਾਹਰਨ ਲਈ:
ਬਹੁਤ ਵਧੀਆ ਸਪਿੰਡਲ ਅਤੇ ਨਿਯੰਤਰਣ, ਵਧੀਆ ਸਖ਼ਤ ਮਸ਼ੀਨ.ਬਹੁਤ ਵਧੀਆ ਬਿਜਲੀ ਦਾ ਕੰਮ, ਵਧੀਆ ਲੱਗ ਰਿਹਾ ਹੈ।
ਟੂਲ ਚੇਂਜਰ ਵੀ ਵਧੀਆ ਕੰਮ ਕਰਦਾ ਹੈ।
ਮੈਂ ਤੁਹਾਡੇ ਤੋਂ 3 ਮਸ਼ੀਨਾਂ ਖਰੀਦੀਆਂ ਹਨ।ਉਹ ਚੰਗੀ ਤਰ੍ਹਾਂ ਕੰਮ ਕਰਦੇ ਹਨ, ਮੈਂ ਤੁਹਾਡੀ ਕੰਪਨੀ ਤੋਂ ਹੋਰ ਉਪਕਰਣ ਖਰੀਦਣਾ ਚਾਹੁੰਦਾ ਹਾਂ।
ਮਸ਼ੀਨ ਟੈਸਟਿੰਗ
1. ਲੀਨੀਅਰ ਮੋਸ਼ਨ ਪੋਜੀਸ਼ਨਿੰਗ ਸ਼ੁੱਧਤਾ ਦਾ ਪਤਾ ਨੋ-ਲੋਡ ਹਾਲਤਾਂ ਦੇ ਅਧੀਨ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ, ਅਤੇ ਲੇਜ਼ਰ ਮਾਪ ਪ੍ਰਬਲ ਹੋਵੇਗਾ।
2. ਲੀਨੀਅਰ ਮੋਸ਼ਨ ਦੀ ਦੁਹਰਾਉਣ ਵਾਲੀ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਖੋਜ, ਖੋਜ ਲਈ ਵਰਤਿਆ ਜਾਣ ਵਾਲਾ ਯੰਤਰ ਉਹੀ ਹੈ ਜੋ ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।
3. ਰੇਖਿਕ ਗਤੀ ਦੇ ਮੂਲ ਦੀ ਵਾਪਸੀ ਦੀ ਸ਼ੁੱਧਤਾ ਦਾ ਪਤਾ ਲਗਾਉਣਾ।
4. ਲੀਨੀਅਰ ਮੋਸ਼ਨ ਦੀ ਰਿਵਰਸ ਗਲਤੀ ਖੋਜ ਨੂੰ ਮੱਧ ਬਿੰਦੂ ਅਤੇ ਸਟਰੋਕ ਦੇ ਦੋਵਾਂ ਸਿਰਿਆਂ ਦੇ ਨੇੜੇ ਤਿੰਨ ਸਥਿਤੀਆਂ 'ਤੇ ਕਈ ਵਾਰ (ਆਮ ਤੌਰ 'ਤੇ 7 ਵਾਰ) ਮਾਪਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਹਰੇਕ ਸਥਿਤੀ ਦੇ ਔਸਤ ਮੁੱਲ ਦੀ ਗਣਨਾ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਅਤੇ ਪ੍ਰਾਪਤ ਕੀਤੇ ਔਸਤ ਮੁੱਲ ਦਾ ਵੱਧ ਤੋਂ ਵੱਧ ਮੁੱਲ ਹੁੰਦਾ ਹੈ। ਉਲਟ ਗਲਤੀ ਮੁੱਲ।






